# ameba-rtos-d
**Repository Path**: monianyin/ameba-rtos-d
## Basic Information
- **Project Name**: ameba-rtos-d
- **Description**: No description available
- **Primary Language**: C
- **License**: Apache-2.0
- **Default Branch**: main
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-06-06
- **Last Updated**: 2025-06-11
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README

* [English Version](./README.md)
如果您有任何问题,请登录瑞昱官方网站[RealMCU](https://www.realmcu.com/) 获取更多信息。
目录
=================
* [1 开始](#1-开始)
* [了解AmebaD](#了解AmebaD)
* [2 文档](#2-文档)
* [3 配置环境](#3-配置环境)
* [Windows](#windows)
* [Linux](#linux)
* [连接串口](#连接串口)
* [4 编译项目](#4-编译项目)
* [Windows GCC](#windows-gcc)
* [Linux终端](#Linux终端)
* [5 固件烧录](#5-固件烧录)
* [6 发布说明](#6-发布说明)
* [7 Matter支持](#7-matter支持)
# 1 开始
## 了解AmebaD
> AmebaD系列有多款型号的芯片可供选择,包括RTL8720CS, RTL8721CSM, RTL8722CSM, RTL8720DN, RTL8720DM, RTL8721DM和RTL8722DM。
> 此外,芯片组内所有型号的芯片都可以集成到AmebaD开发板中,开发板集成了多种多样的I/O接口。我们还提供了对应的HDK(硬件开发包)相关文档,请联系我们获取更多的详细信息。
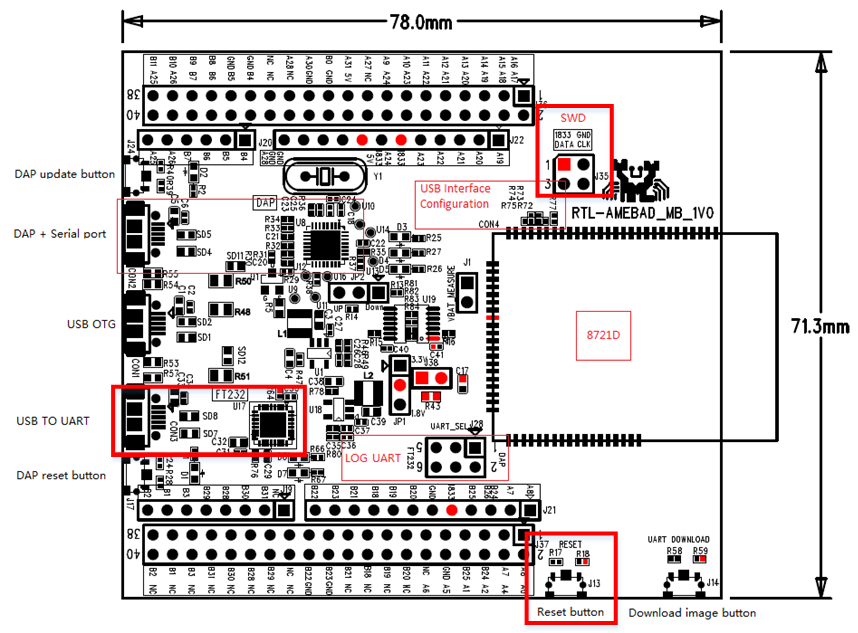
AmebaD开发板的硬件框图如下所示:
- USB TO UART: 供电和log输出
- LOG UART: 波特率为115200bps
- SWD: SWD接口,用于IAR中烧写固件和代码调试
- Reset button: 重启按钮,用于重启AmebaD
# 2 文档
最新文档: [RTL872xCS/RTL872xD Series](https://www.realmcu.com/en/Home/DownloadList/a6248c82-7c9a-4f79-bebf-0df240726c4d)
# 3 配置环境
## 工具链
工具链同时支持Windows和Linux平台。
## Windows
> 注意: Windows平台可以使用``Cygwin``作为GCC开发环境。``Cygwin``是一个大型的GNU和开源工具集合,支持在Windows上提供类似于Linux distribution版本的功能。
> ``Cygwin``下载网址: [http://cygwin.com](http://cygwin.com/), 下载安装包[setup-x86.exe](http://cygwin.com/setup-x86_64.exe)。
1. 32位``Cygwin``同时支持32位和64位Windows系统。
> 注意: 如果不能安装32位Cygwin,请参考[Q: How can I install the last Cygwin version for an old, unsupported Windows?](https://cygwin.com/install.html)。
使用命令行进行安装:
```
setup-2.912.x86.exe --allow-unsupported-windows --site http://ctm.crouchingtigerhiddenfruitbat.org/pub/cygwin/circa/2022/11/23/063457
```
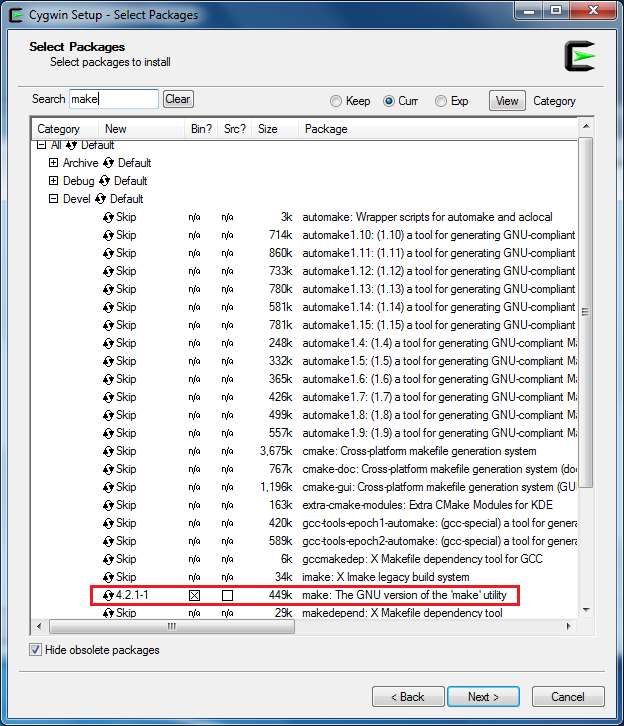
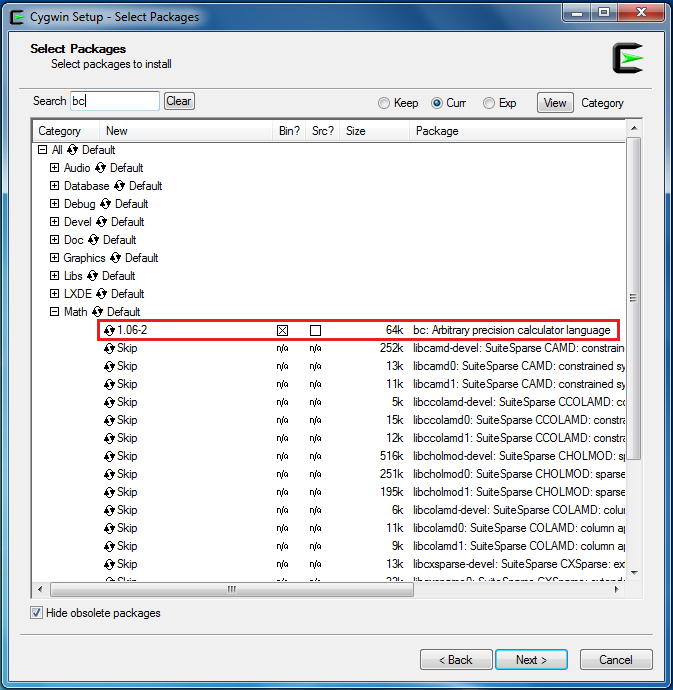
2. 安装``Cygwin``安装包时,在Select Packages页面选择`Devel -> make`和`Math -> bc`,如下所示。
## Linux
> 注意: Linux平台请参考[Ameba-D Application Note(PDF)](https://www.realmcu.com/en/Home/DownloadList/a6248c82-7c9a-4f79-bebf-0df240726c4d) 来配置GCC开发环境。
## 连接串口
> 在AmebaD开发板上,使用FTDI芯片和FT232芯片作为日志输出和调试器。为了观察日志输出,可以使用例如``SecureCRT``/``TeraTerm``/``Putty``等其他的终端工具。
1) 选择实际使用的串口名称,配置串口参数并且打开串口。默认波特率为115200bps。
2) 按下AmebaD开发板上的重启按钮,终端将会打印以下信息。
```
12:27:31.549 calibration_ok:[2:19:11]
12:27:31.656 interface 0 is initialized
12:27:31.658 interface 1 is initialized
12:27:31.659
12:27:31.660 Initializing WIFI ...
12:27:31.757 WIFI initialized
12:27:31.758
12:27:31.760 init_thread(58), Available heap 0x292c0
```
# 4 编译项目
## Windows GCC
以下步骤适用于开发者首次构建GCC项目:
> SDK编译的详细步骤请参考上面链接中应用指南的**Building Code**小节。
> 首先,你需要将路径切换到GCC项目下。对于Windows平台,打开``Cygwin``终端使用命令``cd``切换路径进入KM0或者KM4项目。
> 注意: 需要将``{path}``替换为你自己的SDK路径,在SDK路径前添加``cygdrive``前缀,以便Cygwin访问你的文件系统。
```bash
cd /cygdrive/{path}/project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp
cd /cygdrive/{path}/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp
```
编译默认的固件,直接执行命令``make all``。
对于KM0项目,如果终端输出日志中出现``km0_image2_all.bin``和``Image manipulating end``,则表示KM0的固件已经成功编译,如下所示。
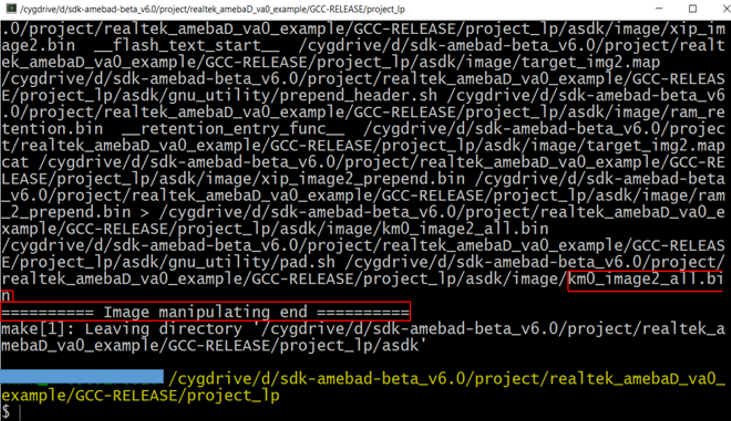
> 如果出现编译失败,请执行命令``make clean``清理工程之后重新编译。
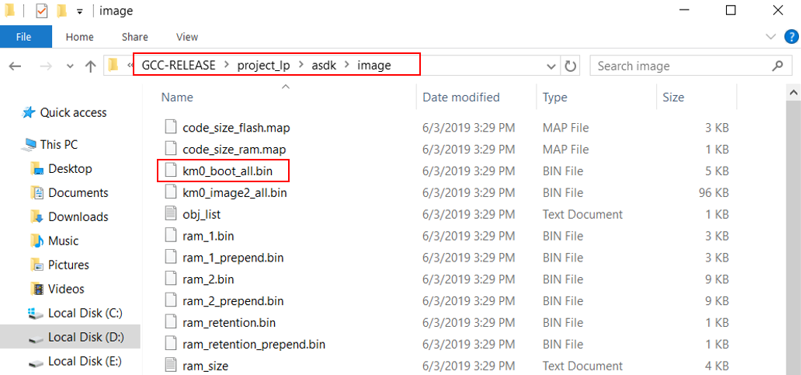
> 编译成功之后,生成的固件所在位置``project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp/asdk/image``,如下所示。
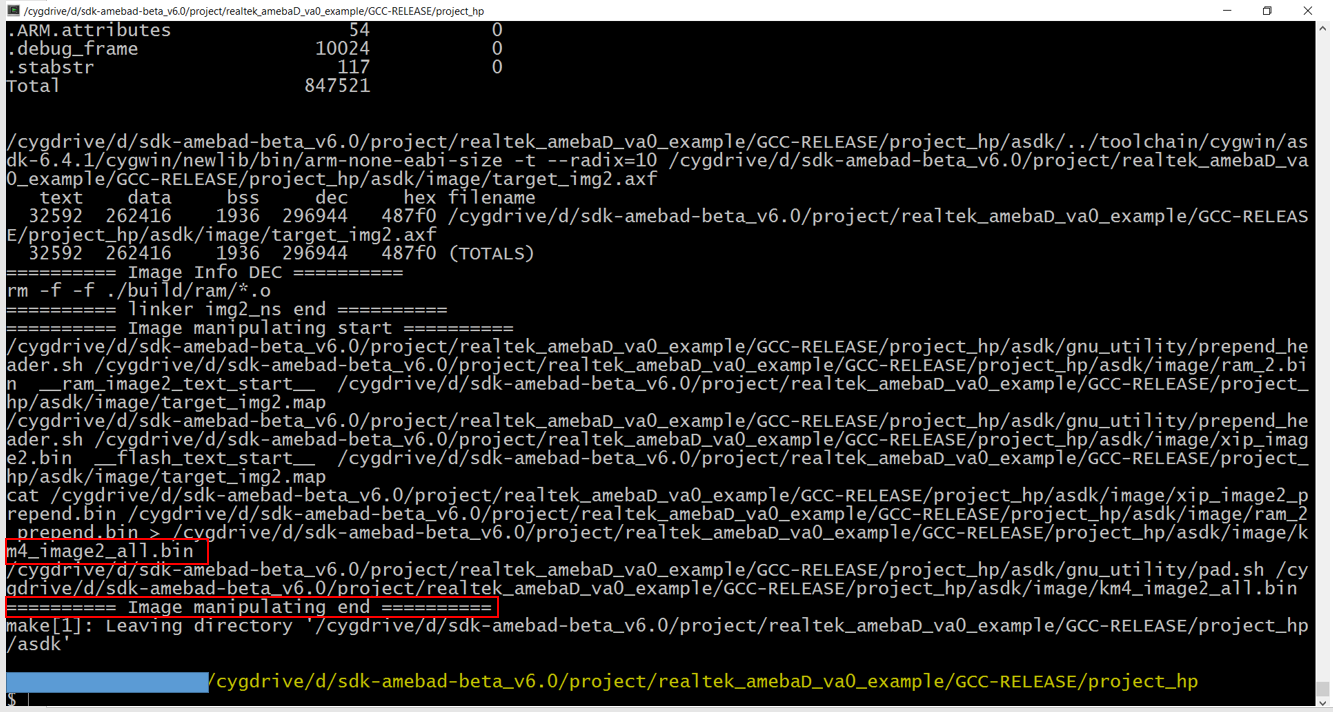
对于KM4项目,如果终端输出日志中出现``km4_image2_all.bin``和``Image manipulating end``,则表示KM4的固件已经成功编译,如下所示。
> 如果出现编译失败,请执行命令``make clean``清理工程之后重新编译。
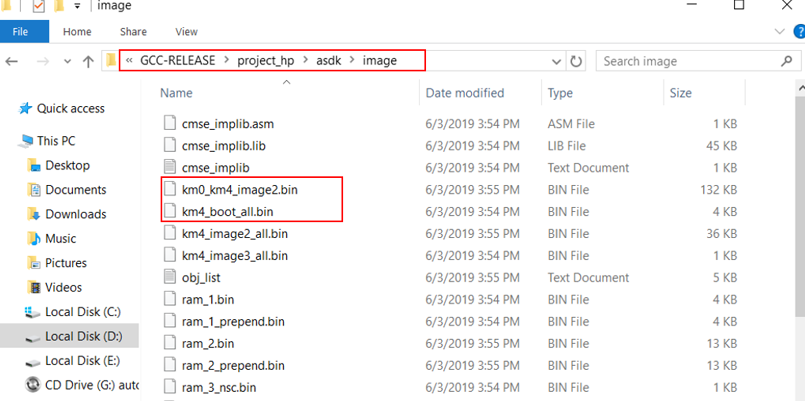
> 编译成功之后,生成的固件所在位置``project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp/asdk/image``,如下所示。
## Linux终端
在Linux终端编译默认固件,
1. 使用以下命令切换路径进入到KM0或者KM4项目
```bash
cd /{path}/project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp
cd /{path}/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp
```
2. 在相应的路径下,执行命令``make all``编译固件。你可以先编译``project_lp``,然后再编译``project_hp``。
- **KM0项目(project_lp)**
- 对于KM0项目,如果终端输出日志中出现``km0_image2_all.bin``和``Image manipulating end``,则表示KM0的固件已经成功编译。
> 如果出现编译失败,请执行命令``make clean``清理工程之后重新编译。
> 编译成功之后,生成的固件所在位置``project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp/asdk/image``。
- **KM4 project (project_hp)**
- 对于KM0项目,如果终端输出日志中出现``km4_image2_all.bin``和``Image manipulating end``,则表示KM4的固件已经成功编译。
> 如果出现编译失败,请执行命令``make clean``清理工程之后重新编译。
> 编译成功之后,生成的固件所在位置``project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp/asdk/image``,如下所示。
> 注意:
> 如果出现如下的错误信息:
```bash
make[1]: execvp: /{path}/ambd_sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp/asdk/gnu_utility/prepend_header.sh: **Permission denied**
Makefile:198: recipe for target 'linker_loader' failed
```
> 请执行以下命令以授予所有相应文件的执行权限:
```bash
chmod -R 777 {path}/project/realtek_amebaD_va0_example/GCC-RELEASE/
```
# 5 固件烧录
当编译结束之后,使用工具[ImageTool](tools/AmebaD/Image_Tool/ImageTool.exe)将固件烧写到芯片中:
* 仅支持Windows系统,包括WinXP,Win7或以上版本,需要安装微软插件.NET Framework 3.5。
假设运行在PC上的ImageTool是服务器,而AmebaD是客户端,服务器端通过UART将固件发送给客户端时,客户端必须先进入烧录模式。
1) **进入UART_DOWNLOAD模式。**
* 按住UART DOWNLOAD按钮,先不要松开。
* 然后按下重启按钮给板子重新上电。
* 最后松开UART DOWNLOAD按钮。
现在AmebaD进入了UART_DOWNLOAD模式,准备开始接收数据。
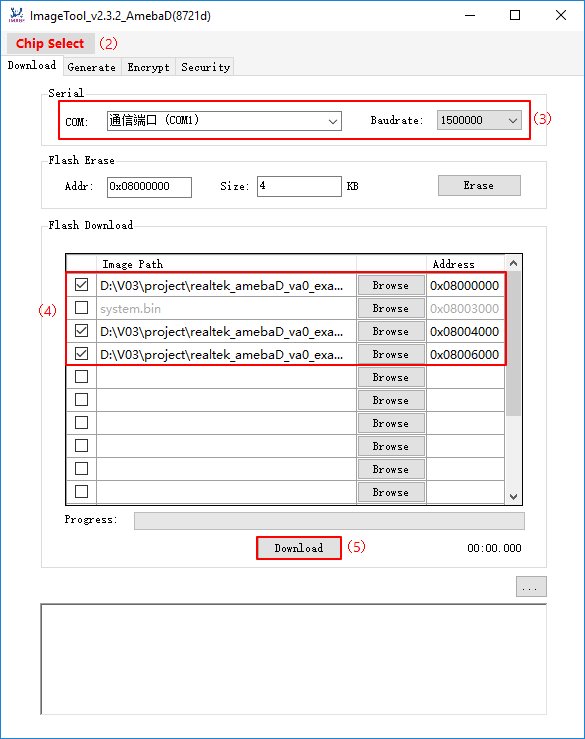
2) **在ImageTool UI界面点击Chip Select按钮,选择芯片AmebaD。**
3) **选择实际使用的串口和传输波特率。默认的波特率是1.5Mbps(推荐)。**
4) **点击Browse按钮选择固件(km0_boot_all.bin/km4_boot_all.bin/km0_km4_image2.bin),设置烧写的起始地址。**
* 固件所在路径:
```
{path}\project\realtek_amebaD_va0_example\GCC-RELEASE\project_lp\asdk\image
{path}\project\realtek_amebaD_va0_example\GCC-RELEASE\project_hp\asdk\image
```
其中{path}是你的实际SDK的路径。
* ImageTool界面显示的默认的起始地址即为SDK中默认的固件起始地址,可以直接使用。
5) **点击Download按钮开始烧写,每个固件的下载进度都会显示在进度条上,日志窗口提供当前操作状态信息。**
# 6 发布说明
> 注意: 对于蓝牙例程,目前仅支持`BT_peripheral`,`BT_central`,`BT_scatternet`和`BT_config`这四个例子。
## 版本同步
GitHub仓库`ameba-rtos-d`目前同步到6.2 Git分支的版本为73b6c5ec。
# 7 Matter支持
请下载[ameba-rtos-matter](https://github.com/Ameba-AIoT/ameba-rtos-matter) 获取更多关于Matter的信息。