# 蓝牙转WIFI计步上位机
**Repository Path**: tytokongjian/StepCountingUpperPC
## Basic Information
- **Project Name**: 蓝牙转WIFI计步上位机
- **Description**: 这是一个WIFI上位机,接收底层MPU6050数据,途中转蓝牙从机透传,到蓝牙主机直连WIFI,PC端UDP通信,实现三轴加速度数据传送和计步功能。
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 18
- **Forks**: 9
- **Created**: 2021-06-17
- **Last Updated**: 2025-09-12
## Categories & Tags
**Categories**: hardware
**Tags**: None
## README
蓝牙转WIFI计步上位机
### 1. 设计简介
本上位机采用.NET平台下的WPF实现一个MPU6050数据从蓝牙从机——>蓝牙主机——>WIFI的UDP接收数据传输并可视化的功能。

#### 1.1 运行环境
.Net平台下的WPF。VS2019(需安装C#支持的环境)。拿到源码打开 BluetoothPC.sln 运行正常即可。
设计了一个很好看的UI图标:)

### 2. 设计流程
#### 2.1 设计框架
前台XAML的UI设计不过多介绍,主要看设计需求,逃不开模板、触发器、动画、样式之类的技术。
后台C#在UI主线程下开了三个子线程:
1. UDP数据监听接收线程。
2. 三轴数据UI更新线程。
3. 计步和进度条数据更新线程。
因没有碰到多个线程访问同一个UI控件或写同一个UI控件,所以没用到锁,但内部加了异步延迟,让UI更新顺滑一些。
#### 2.2 服务器连接设计
UDP端IP地址和端口号需正常且有效,加了错误弹窗,若出现下图请重新输入:

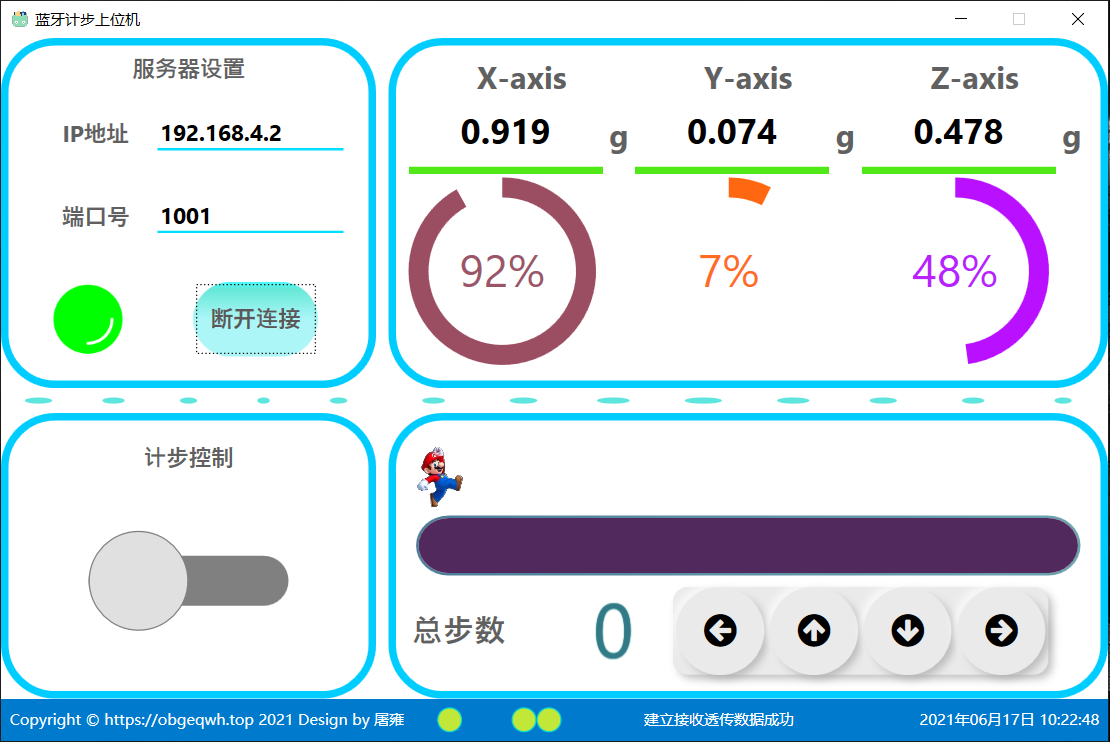
#### 2.3 三轴加速度显示
有硬件:成功连接上之后需配合底层硬件,这里是接收UDP发过来的3轴加速度值。
无硬件:如果没有硬件也行,自行找个网络调试助手,开个UDP服务,本机连接就行,发送的数据需包含以下格式:
* 任意字符(**:1.23938 mG**)任意字符。
解释:发送过来的数据必须包含在 **:xxxx mG** 内,**冒号**和**mG**不能少,可任意多组,每组代表一轴数据。
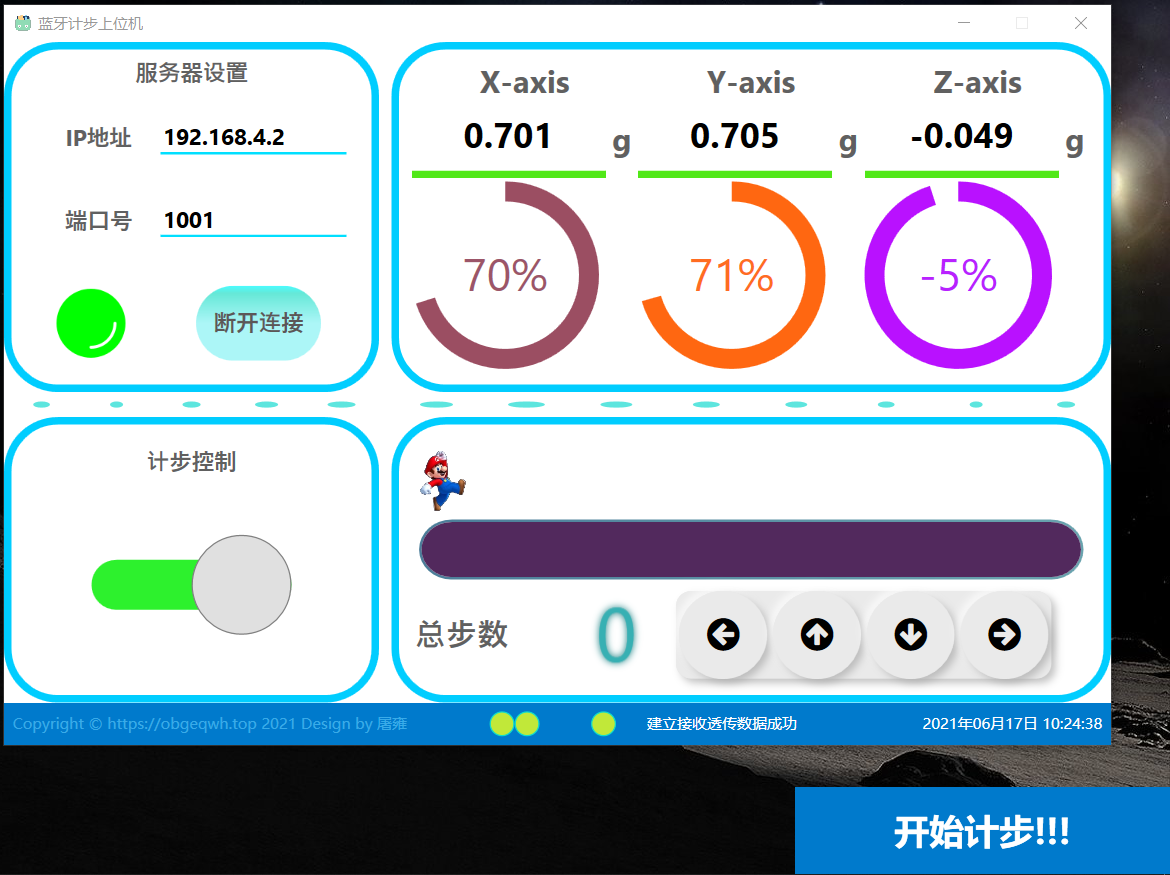
#### 2.4 计步显示
利用三轴加速度提供的数据处理步数。需打开左下角计步控制按钮。打开后弹出提示:

本计步算法仅支持手臂摆动的峰峰值计步,若有更好的算法请分享,万分感谢!!!
计步程序如下
```c#
/*
* valueNum - 存放三轴数据(x,y,z)的个数
* tempValue - 用于存放计算阈值的波峰波谷差值的数组(在这个方法里存放值数组长度为5)
* isDirectionUp - 是否上升的标志位
* continueUpCount - 持续上升的次数
* continueUpFormerCount - 上一点的持续上升的次数,为了记录波峰的上升次数
* lastStatus - 上一点的状态,上升还是下降
* peakOfWave - 波峰值
* valleyOfWave - 波谷值
* timeOfThisPeak - 此次波峰的时间
* timeOfLastPeak - 上次波峰的时间
* timeOfNow - 当前的时间
* gravityOld - 上次传感器的值
* initialValue - 动态阈值需要动态的数据,这个值用于这些动态数据的阈值,这个值是由大量数据得来的
* ThreadValue - 初始阈值,这个值是由大量数据得来的
* minValue - 初始最小值 计算出来的xyz数值乘重力加速度(9.8),此为手机拿在手里(不摆臂)(由自己多次测试得出的值)
* maxValue - 初始最大值 自己设定的最大值(我们定位2)乘重力加速度(9.8),此为手机拿在手里(不摆臂)(由自己多次测试得出的值)
* g - 重力加速度(9.8)
* thisSteps 步数
*/
private int valueNum = 5;
//private double[] tempValue;
private List tempValue = new List();
private Boolean isDirectionUp = false;
private int continueUpCount = 0;
private int continueUpFormerCount = 0;
private Boolean lastStatus = false;
private double peakOfWave = 0;
private double valleyOfWave = 0;
private double timeOfThisPeak = 0;
private double timeOfLastPeak = 0;
private double timeOfNow = 0;
private double gravityOld = 0;
private double initialValue = 1.7;
private double ThreadValue = 2.0;
private double minValue = 11;
private double maxValue = 19.6;
private double g = 9.8;
private double thisSteps = 0; //当前步数
private double StepsCopy = 0; //步数复制
///
/// 监测新的步数 如果检测到了波峰,并且符合时间差以及阈值的条件,则判定为1步
/// 符合时间差条件,波峰波谷差值大于initialValue,则将该差值纳入阈值的计算中
///
/// 加速传感器三轴的平均值
public void detectorNewStep(double _values)
{
if (gravityOld == 0)
{
gravityOld = _values;
}
else
{
if (detectorPeak(_values, gravityOld))
{
timeOfLastPeak = timeOfThisPeak;
timeOfNow = Convert.ToInt64((DateTime.UtcNow - new DateTime(1970, 1, 1, 0, 0, 0, 0)).TotalMilliseconds);
//时间差大于200ms,小于2s
if (((timeOfNow - timeOfLastPeak) >= 200) && ((timeOfNow - timeOfLastPeak) <= 2000) && ((peakOfWave - valleyOfWave) >= ThreadValue))
{
timeOfThisPeak = timeOfNow;
//增加步数
thisSteps++;
//增加步数复制
StepsCopy++;
}
if(((timeOfNow - timeOfLastPeak) >= 200) && ((peakOfWave - valleyOfWave) >= initialValue))
{
timeOfThisPeak = timeOfNow;
double _diffWaveVal = peakOfWave - valleyOfWave;
ThreadValue = peak_Valley_Thread(_diffWaveVal);
}
}
gravityOld = _values;
}
}
///
/// 监测波峰
/// 以下四个条件判断为波峰
/// 1.目前点为下降的趋势:isDirectionUp为false
/// 2.之前的点为上升的趋势:lastStatus为true
/// 3.到波峰为止,持续上升大于等于2次
/// 4.波峰值大于minValue,小于maxValue
/// 记录波谷值
/// 1.观察波形图,可以发现在出现步子的地方,波谷的下一个就是波峰,有比较明显的特征以及差值
/// 2.所以要记录每次的波谷值,为了和下次的波峰作对比
///
///
///
///
public Boolean detectorPeak(double _newValue, double _oldValue)
{
lastStatus = isDirectionUp;
if (_newValue >= _oldValue)
{
isDirectionUp = true;
continueUpCount++;
}
else
{
continueUpFormerCount = continueUpCount;
continueUpCount = 0;
isDirectionUp = false;
}
if (!isDirectionUp && lastStatus && (continueUpFormerCount >= 2 && (_oldValue >= minValue && _oldValue < maxValue)))
{
//满足上面波峰的四个条件,此时为波峰状态
peakOfWave = _oldValue;
return true;
}
else if (!lastStatus && isDirectionUp)
{
//满足波谷条件,此时为波谷状态
valleyOfWave = _oldValue;
return false;
}
else
{
return false;
}
}
///
/// 阈值的计算
/// 1.通过波峰波谷的差值计算阈值
/// 2.记录4个值,存入tempValue[] 数组中
/// 3.在将数组传入函数averageValue中计算阈值
///
///
///
public double peak_Valley_Thread(double _value)
{
double _tempThread = ThreadValue;
List _tempValue = new List(tempValue);
if (tempValue.Count < valueNum)
{
tempValue.Add(_value);
}
else
{
//tempValue数组长度=valueNum=5
_tempThread = averageValue(tempValue);
_tempValue.RemoveAt(0);
_tempValue.Add(_value);
tempValue = _tempValue;
}
return _tempThread;
}
///
/// 梯度化阈值
/// 1.计算数组的均值
/// 2.通过均值将阈值梯度化在一个范围里
/// 这些数据是通过大量的统计得到的
///
///
///
public double averageValue(List _value)
{
if (_value.Count != 0)
{
double _ave = 0;
foreach (double i in _value)
_ave += i;
_ave = _ave / _value.Count;
if(_ave >= 8)
{
_ave = 4.3;
}
else if (_ave >= 7 && _ave < 8)
{
_ave = 3.3;
}
else if (_ave >= 4 && _ave < 7)
{
_ave = 2.3;
}
else if (_ave >= 3 && _ave < 4)
{
_ave = 2.0;
}
else
{
_ave = 1.7;
}
return _ave;
}
else
{
return 1.7;
}
}
```
计步效果如下所示:
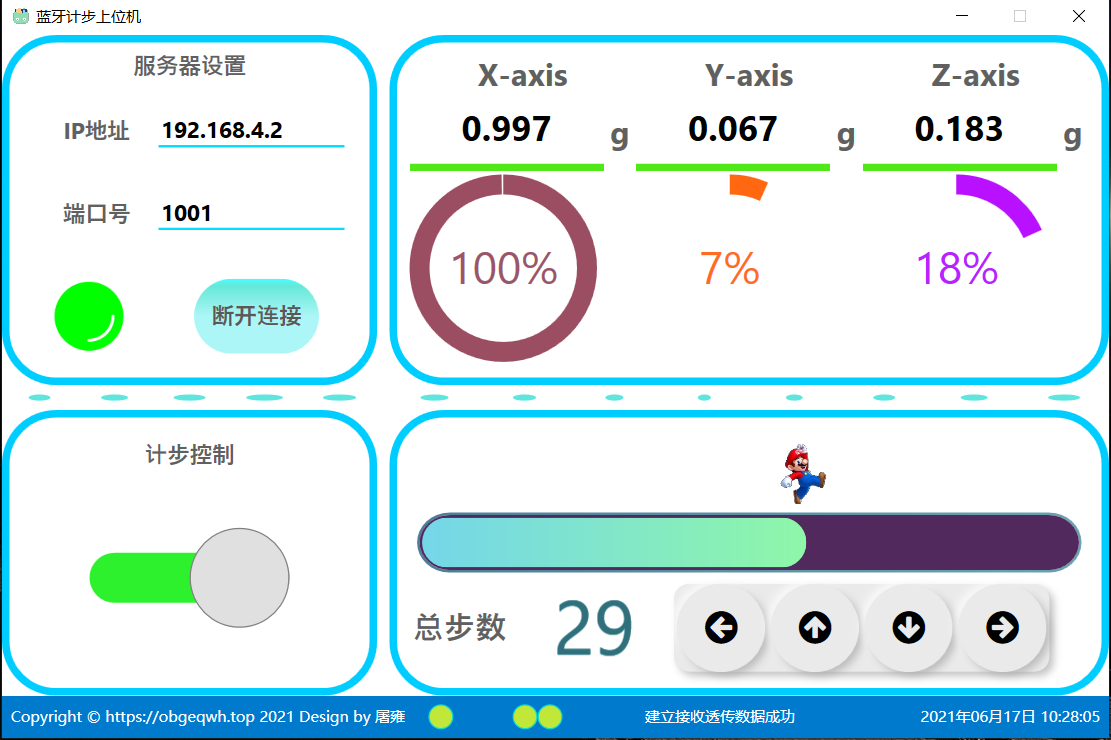
开启步数控制按钮后总步数累加,进度条进度为50步,每到达50步距离弹出提示框,计步结束也弹提示框通知。
#### 2.5 倾力UI按钮设计
设计了一组拟物化按钮,目前无任何功能,有需要的小伙伴自行更改设计功能。

### 3. 总结
本上位机是课程设计的一个附属品,有需要的小伙伴拿去改改,望点个star <- .->!