# ecal_learning
**Repository Path**: weipushan/ecal_learning
## Basic Information
- **Project Name**: ecal_learning
- **Description**: 个人 eCAL 消息中间件 学习仓库
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 1
- **Forks**: 0
- **Created**: 2022-12-19
- **Last Updated**: 2023-10-20
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# eCAL 学习笔记
## 资源
- [Homepage](https://eclipse-ecal.github.io/ecal/)
- [Github](https://github.com/eclipse-ecal/ecal)
## 介绍
- eCAL (**e**nhanced **C**ommunication **A**bstraction **L**ayer)
- 由 Continental 开源的消息中间件,目前由 Eclipse 管理
- 数据传输方式
- 本地通信: 共享内存
- 网络通信: UDP / TCP (大数据量)
- 通信方式
- Topic: publish-subscribe
- Service: server-client
- 相比 ROS 没有中间代理商,无需master节点
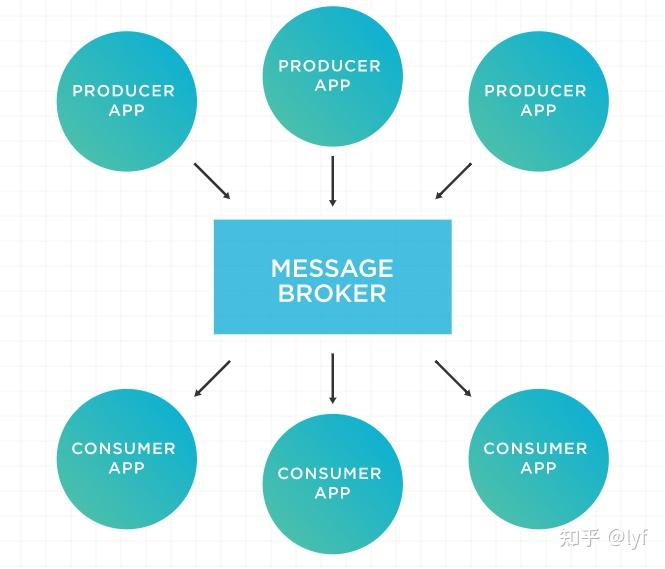
- Message Broker
- 所有消息的发送/接收都要经过broker,所以broker会成为整个系统的瓶颈点,影响整个系统的数据传输的延时和吞吐量。
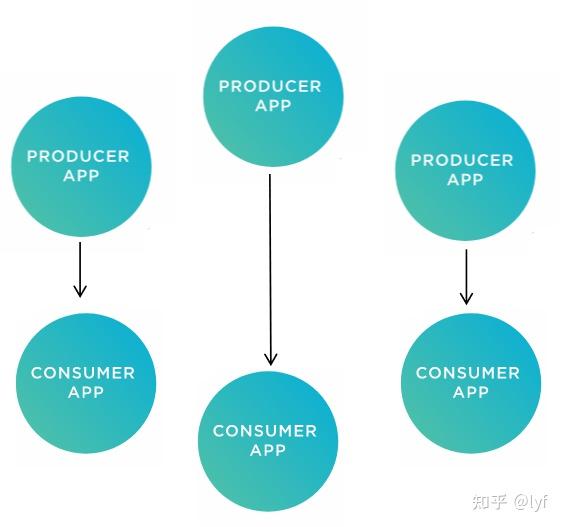
-  - Message Brokerless
- 点对点直接连接,该网络架构适合于低延时/高并发的场景。
-
- Message Brokerless
- 点对点直接连接,该网络架构适合于低延时/高并发的场景。
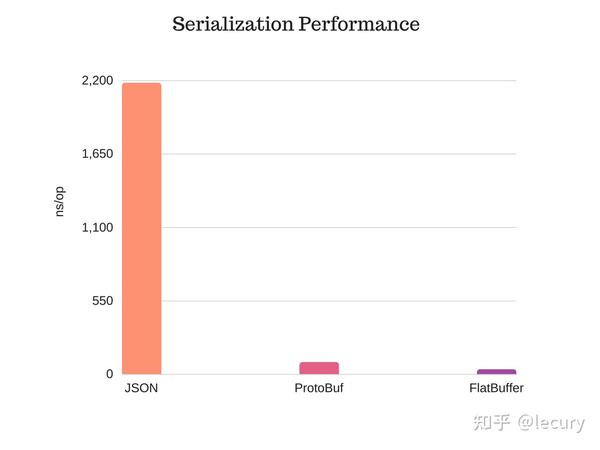
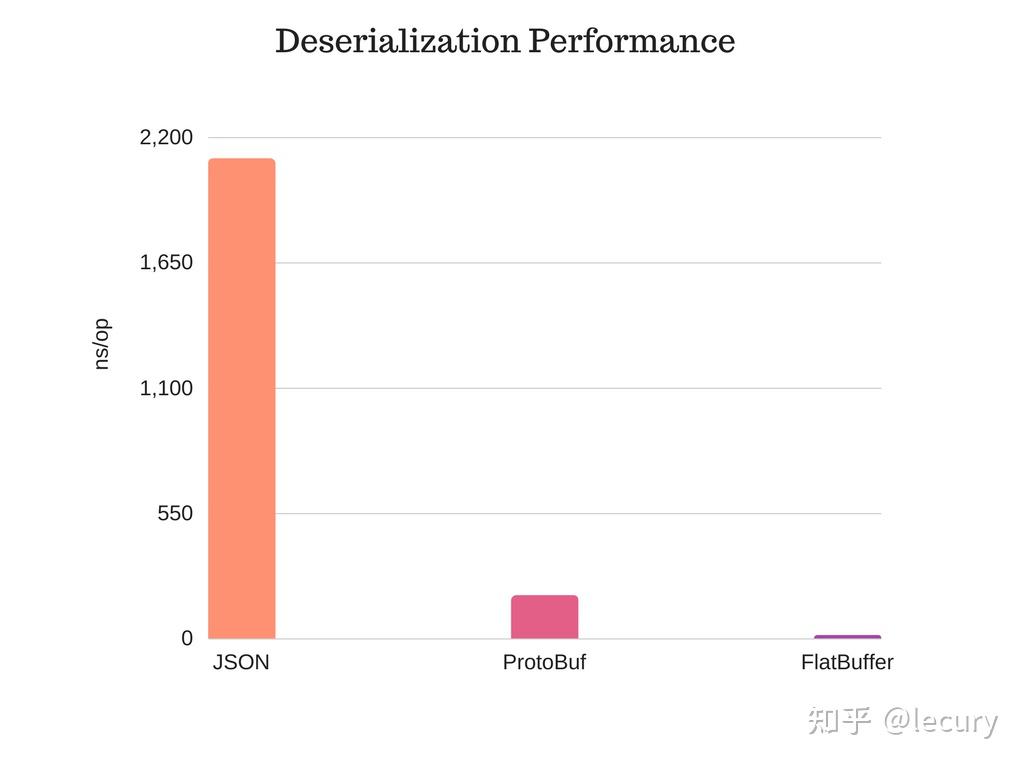
-  - 支持多种数据序列化方法
- google protobuf, CapnProto, Flatbuffer, ...
- **序列化:**把对象转化为可传输的字节序列过程称为序列化。
**反序列化:**把字节序列还原为对象的过程称为反序列化。
- 最终的目的是为了对象可以**跨平台存储,和进行网络传输**
## Protobuf vs JSON
| 特性 \ 类型 | json | protobuf |
| ------------ | ------------ | ---------------- |
| 数据结构支持 | 简单结构 | 复杂结构 |
| 灵活程度 | 灵活使用 | 通过消息文件约束 |
| 数据保存方式 | 文本 | 二进制 |
| 数据保存大小 | 大 | 小 |
| 编解码效率 | 慢 | 快 |
| 语言支持程度 | 覆盖主流语言 | 覆盖主流语言 |
- 支持多种数据序列化方法
- google protobuf, CapnProto, Flatbuffer, ...
- **序列化:**把对象转化为可传输的字节序列过程称为序列化。
**反序列化:**把字节序列还原为对象的过程称为反序列化。
- 最终的目的是为了对象可以**跨平台存储,和进行网络传输**
## Protobuf vs JSON
| 特性 \ 类型 | json | protobuf |
| ------------ | ------------ | ---------------- |
| 数据结构支持 | 简单结构 | 复杂结构 |
| 灵活程度 | 灵活使用 | 通过消息文件约束 |
| 数据保存方式 | 文本 | 二进制 |
| 数据保存大小 | 大 | 小 |
| 编解码效率 | 慢 | 快 |
| 语言支持程度 | 覆盖主流语言 | 覆盖主流语言 |
 ## 安装
- 目前根据 aiforce::core 的 ECAL 5.9.5 版本进行安装
- Ubuntu 18.04 x86_64 与 ARM64
- ECAL 5.9.5
- Protobuf 3.0.2
- Ubuntu 20.04 x86_64
- ECAL 5.9.5
- Protobuf 3.6.1
- Install Protobuf
```bash
# install protobuf dependencies
sudo apt-get install autoconf automake libtool curl make g++ unzip
# download protobuf 3.0.2 source code from github
# download gmock using autogen.sh, this step needs proxy, otherwise the zip file will be uncomplete
./autogen.sh
# build
#./configure --prefix=/usr # for custom path
./configure # /usr/local
make -j8
make check # no need
sudo make install
sudo ldconfig
```
- Install ecal
```bash
# install 5.11
sudo add-apt-repository ppa:ecal/ecal-5.9
sudo apt-get update
sudo apt-get install ecal
```
## 官方例程
- Topic 传输
- ecal_sample_person_snd/rec
```bash
# 发送节点: 发送person信息
ecal_sample_person_snd
# 接受节点: 接受person信息
ecal_sample_person_rec
```
- 同一发布节点开启多次, 会在同一topic下发布不同节点的内容
- 同一接受节点开启多次, 也会接受同一topic下不同内容
- Service 传输
- ecal_sample_math_server/client
```bash
# server: 负责接受数学计算的请求和提供数学计算
ecal_sample_math_server
# client: 负责发出数学计算的请求和接受结果
ecal_sample_math_client
```
- 同一server节点开启多次, 都会接受到对应service topic的请求
- 同一client开启多次, 也会与同一名字的server连接
## Applications
- eCAL Monitor
- 显示节点,消息,进程,服务等信息
- bug:不同service 相同method名称,只能显示一个
```bash
# start ecal monitor
ecal_mon_gui
```
- eCAL Recorder
- 数据通过HDF5格式进行记录
- ```bash
# start eCAL Recorder
ecal_rec_gui
```
- eCAL Player
- 回放录制的数据
- ```bash
# start eCAL player
ecal_play_gui
# 配合 ecal_mon_gui 查看数据
```
- eCAL Sys
- 开启、关闭、监控节点
- ```bash
# start ecal_sys_gui
ecal_sys_gui
# 可以一次性开启多个节点
# 可以保存配置文件,类似ROS的launch文件
```
## Demos - C++
### Demo00_protobuf_cmake_example
简单的Protobuf消息编译例子。
### Demo01_ecal_helloworld
- 本例程演示了如何通过ecal实现简单的pub/sub功能
### Demo02_ecal_helloworld_protobuf
- 本例程演示了如何通过ecal传输protobuf消息
- 这个demo同时测试了5.9.5版本的ECAL subscriber callback 是单线程的,在callback中的耗时操作会影响主线程或其他callback。
### Demo03_minimal_service
- 本例程演示了如何通过ecal构建简单的service功能
- server 特性
- 同一个节点可以有多个server
- 同一个server可以有多个method
- 同一个server同一时间只能被调用一次,后续的调用在当前调用未完成时会被阻塞
- 不同server同一时间可以被同时调用
- client 特性
- Call
- 直接调用,会阻塞后续操作,直到当前调用完成
- CallAsync
- 异步调用,需要绑定callback,单次调用不会阻塞,多次调用仍然需要等待前一次调用结束
### Demo04_math_service
- 本例程演示了如何通过 protobuf 的 RPC 机制实现 ECAL service
### Demo05_ping_service
- 本例程演示了如何通过 protobuf 的 RPC 机制实现 ECAL service
### Demo06_ecal_binary
- 本例程演示了如何通过 eCAL 发布 binary 数据
### Demo07_ecal_camera_examples
- 该demo包括了一个USB相机数据发布程序和一个 ecal_mon_gui 插件, 用以显示相机图像
- 原始项目地址: [ecal-caemra-samples](https://github.com/eclipse-ecal/ecal-camera-samples)
- ecal_camera_snd
- 主要是通过QT相关组件获取图像数据并转换为protobuf数据
- camera_receiver_mon_plugin
- ecal_mon_gui 插件, 通过qt插件显示订阅的图像
- 安装方法
```bash
# install dependencies
sudo apt install ecal \
qtmultimedia5-dev \
libqt5multimedia5-plugins \
qtwayland5 \
protobuf-compiler \
libprotoc-dev \
libhdf5-dev \
cmake
# build&install
mkdir build
cd build
# prefix install path set to /usr due to ecal install path is /usr
cmake .. -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr
make -j8
sudo make install
```
- 使用方法
```bash
# 启动相机数据发布程序
# ecal_camera_snd [topicName] [cameraName] [OPTIONAL_resolutionWidth] [OPTIONAL_resolutionHeight] [OPTIONAL_maxFps]
ecal_camera_snd usbcam /dev/video0 1280 720 30
# 启动 ecal_mon_gui, 点击 topic 即可显示图像
ecal_mon_gui
```

### Demo08_ecal_cvmat_protobuf
- 本例程演示了通过 ecal 和 protobuf 序列化传输 `cv::Mat` 数据
- cvmat_proto_puber.cpp
- cvmat_proto_suber.cpp
- 传输效果如下:
### Demo09_ecal_pcl_pointcloud_protobuf
- 本例程演示了通过 ecal 和 protobuf 序列化传输 `pcl::PointCloud` 数据
- pcl_protobuf_puber.cpp
- pcl_protobuf_suber.cpp
- 传输效果如下, 点云会沿X轴左右移动

## 安装
- 目前根据 aiforce::core 的 ECAL 5.9.5 版本进行安装
- Ubuntu 18.04 x86_64 与 ARM64
- ECAL 5.9.5
- Protobuf 3.0.2
- Ubuntu 20.04 x86_64
- ECAL 5.9.5
- Protobuf 3.6.1
- Install Protobuf
```bash
# install protobuf dependencies
sudo apt-get install autoconf automake libtool curl make g++ unzip
# download protobuf 3.0.2 source code from github
# download gmock using autogen.sh, this step needs proxy, otherwise the zip file will be uncomplete
./autogen.sh
# build
#./configure --prefix=/usr # for custom path
./configure # /usr/local
make -j8
make check # no need
sudo make install
sudo ldconfig
```
- Install ecal
```bash
# install 5.11
sudo add-apt-repository ppa:ecal/ecal-5.9
sudo apt-get update
sudo apt-get install ecal
```
## 官方例程
- Topic 传输
- ecal_sample_person_snd/rec
```bash
# 发送节点: 发送person信息
ecal_sample_person_snd
# 接受节点: 接受person信息
ecal_sample_person_rec
```
- 同一发布节点开启多次, 会在同一topic下发布不同节点的内容
- 同一接受节点开启多次, 也会接受同一topic下不同内容
- Service 传输
- ecal_sample_math_server/client
```bash
# server: 负责接受数学计算的请求和提供数学计算
ecal_sample_math_server
# client: 负责发出数学计算的请求和接受结果
ecal_sample_math_client
```
- 同一server节点开启多次, 都会接受到对应service topic的请求
- 同一client开启多次, 也会与同一名字的server连接
## Applications
- eCAL Monitor
- 显示节点,消息,进程,服务等信息
- bug:不同service 相同method名称,只能显示一个
```bash
# start ecal monitor
ecal_mon_gui
```
- eCAL Recorder
- 数据通过HDF5格式进行记录
- ```bash
# start eCAL Recorder
ecal_rec_gui
```
- eCAL Player
- 回放录制的数据
- ```bash
# start eCAL player
ecal_play_gui
# 配合 ecal_mon_gui 查看数据
```
- eCAL Sys
- 开启、关闭、监控节点
- ```bash
# start ecal_sys_gui
ecal_sys_gui
# 可以一次性开启多个节点
# 可以保存配置文件,类似ROS的launch文件
```
## Demos - C++
### Demo00_protobuf_cmake_example
简单的Protobuf消息编译例子。
### Demo01_ecal_helloworld
- 本例程演示了如何通过ecal实现简单的pub/sub功能
### Demo02_ecal_helloworld_protobuf
- 本例程演示了如何通过ecal传输protobuf消息
- 这个demo同时测试了5.9.5版本的ECAL subscriber callback 是单线程的,在callback中的耗时操作会影响主线程或其他callback。
### Demo03_minimal_service
- 本例程演示了如何通过ecal构建简单的service功能
- server 特性
- 同一个节点可以有多个server
- 同一个server可以有多个method
- 同一个server同一时间只能被调用一次,后续的调用在当前调用未完成时会被阻塞
- 不同server同一时间可以被同时调用
- client 特性
- Call
- 直接调用,会阻塞后续操作,直到当前调用完成
- CallAsync
- 异步调用,需要绑定callback,单次调用不会阻塞,多次调用仍然需要等待前一次调用结束
### Demo04_math_service
- 本例程演示了如何通过 protobuf 的 RPC 机制实现 ECAL service
### Demo05_ping_service
- 本例程演示了如何通过 protobuf 的 RPC 机制实现 ECAL service
### Demo06_ecal_binary
- 本例程演示了如何通过 eCAL 发布 binary 数据
### Demo07_ecal_camera_examples
- 该demo包括了一个USB相机数据发布程序和一个 ecal_mon_gui 插件, 用以显示相机图像
- 原始项目地址: [ecal-caemra-samples](https://github.com/eclipse-ecal/ecal-camera-samples)
- ecal_camera_snd
- 主要是通过QT相关组件获取图像数据并转换为protobuf数据
- camera_receiver_mon_plugin
- ecal_mon_gui 插件, 通过qt插件显示订阅的图像
- 安装方法
```bash
# install dependencies
sudo apt install ecal \
qtmultimedia5-dev \
libqt5multimedia5-plugins \
qtwayland5 \
protobuf-compiler \
libprotoc-dev \
libhdf5-dev \
cmake
# build&install
mkdir build
cd build
# prefix install path set to /usr due to ecal install path is /usr
cmake .. -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr
make -j8
sudo make install
```
- 使用方法
```bash
# 启动相机数据发布程序
# ecal_camera_snd [topicName] [cameraName] [OPTIONAL_resolutionWidth] [OPTIONAL_resolutionHeight] [OPTIONAL_maxFps]
ecal_camera_snd usbcam /dev/video0 1280 720 30
# 启动 ecal_mon_gui, 点击 topic 即可显示图像
ecal_mon_gui
```

### Demo08_ecal_cvmat_protobuf
- 本例程演示了通过 ecal 和 protobuf 序列化传输 `cv::Mat` 数据
- cvmat_proto_puber.cpp
- cvmat_proto_suber.cpp
- 传输效果如下:
### Demo09_ecal_pcl_pointcloud_protobuf
- 本例程演示了通过 ecal 和 protobuf 序列化传输 `pcl::PointCloud` 数据
- pcl_protobuf_puber.cpp
- pcl_protobuf_suber.cpp
- 传输效果如下, 点云会沿X轴左右移动
